Background¶
Page with general background information about tracking and alignment.
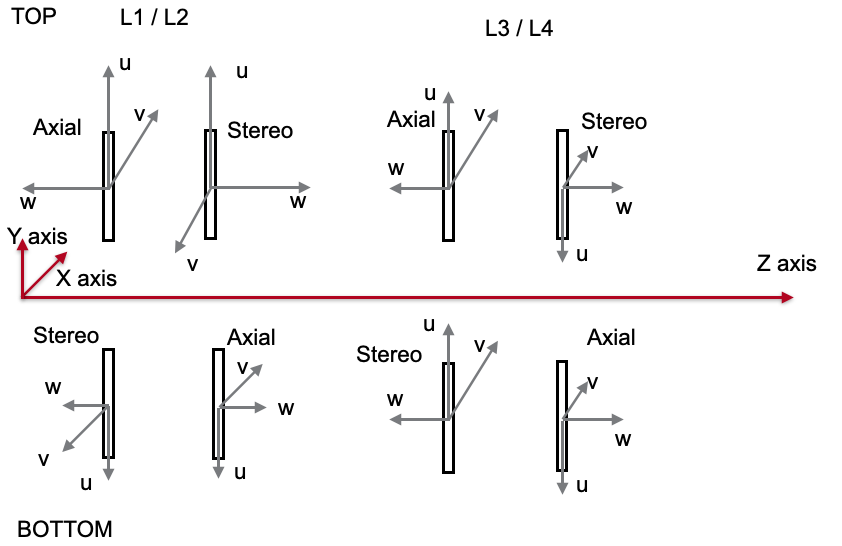
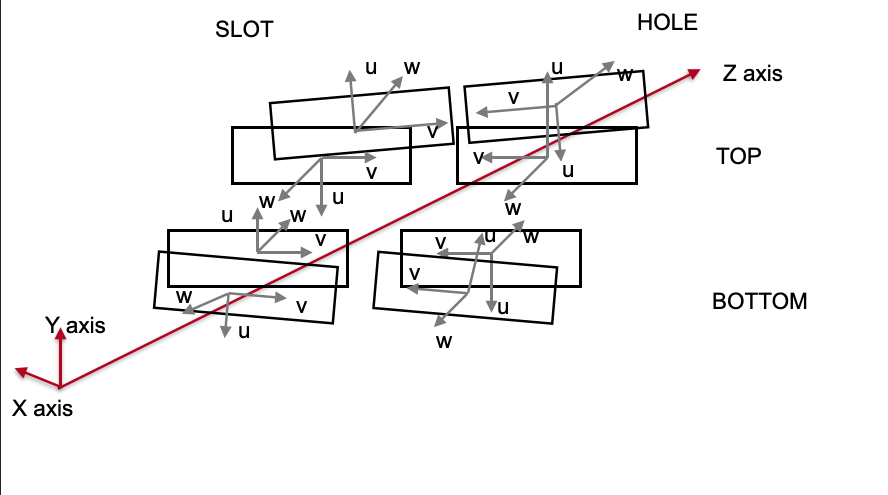
UVW Coordinates¶
The sensor-local coordinates are labeled UVW and are different from the global XYZ coordinates by a translation and rotation. The rotations are mostly small deviations from parallel or antiparallel.
Front¶
Back¶
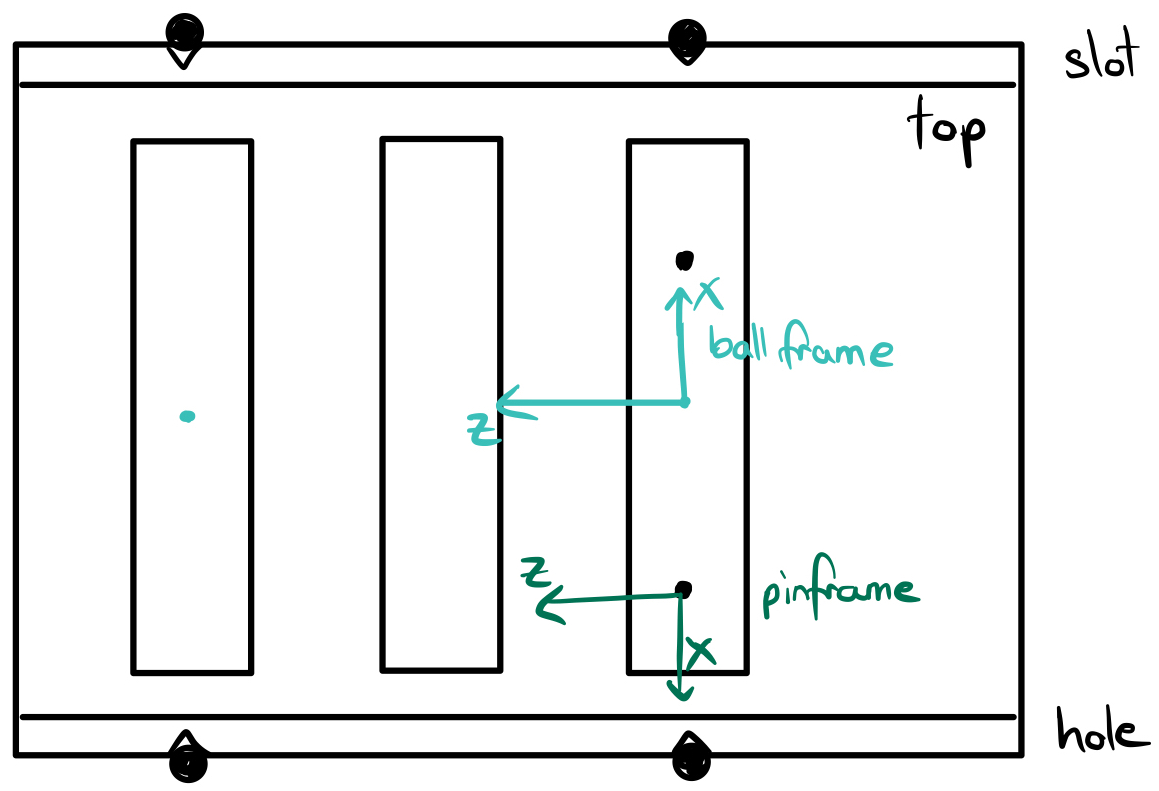
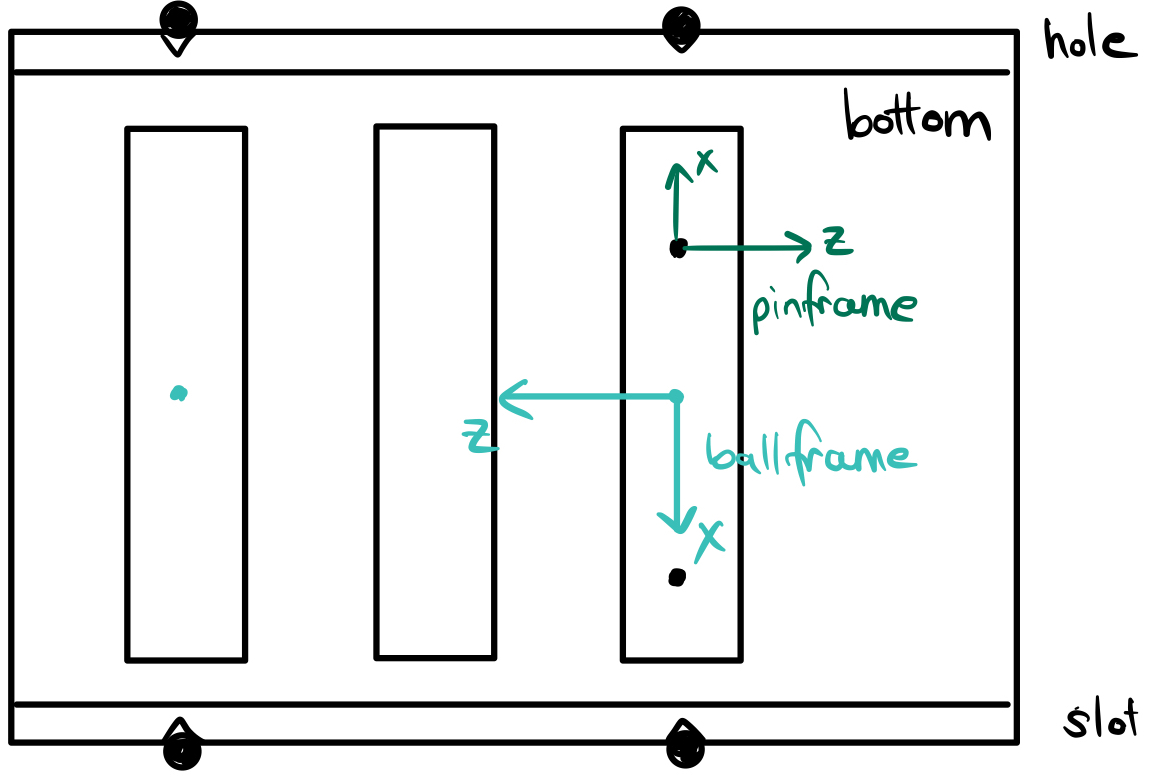
UChannel Ball and Pin Frames¶
The uchannel has two coordinate systems, called ball and pin frame, respectively. In the diagrams below, the front of the uchannel is on the right side, the back is on the left.
Top¶
Bottom¶
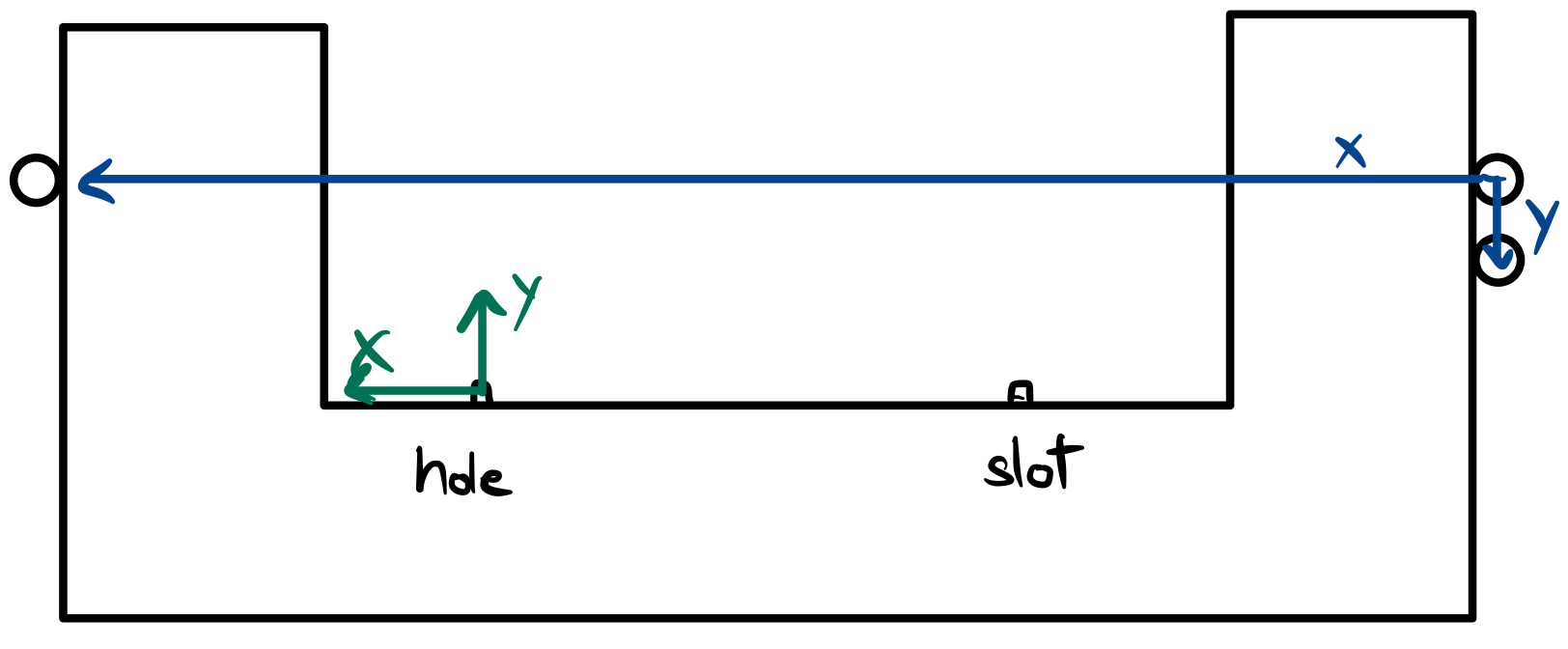
Fixture Ball and Pin Frames¶
The fixture in which the sensors are measured also has two coordinate systems. The fixture pin frame is the same as the uchannel pin frame. The ball frames are different and share names because in both cases small metal balls are used to define the system.